Back to my homepage
3D Reconstruction
1. Two 2D input images
 (a) Image1
(a) Image1
 (b) Image2
(b) Image2
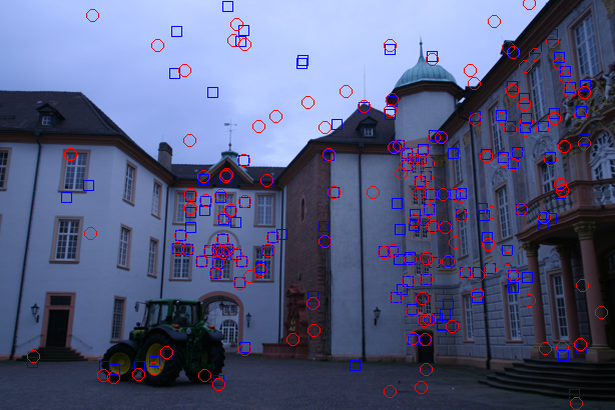
2. Matching Inliners by SIFT and RANSAC Estimation of the Essential Matrix E

3. Epipolar Lines for Matching points
 (a) Epipolar Lines in Camera1's Image Plane
(a) Epipolar Lines in Camera1's Image Plane
 (b) Epipolar Lines in Camera2's Image Plane
(b) Epipolar Lines in Camera2's Image Plane
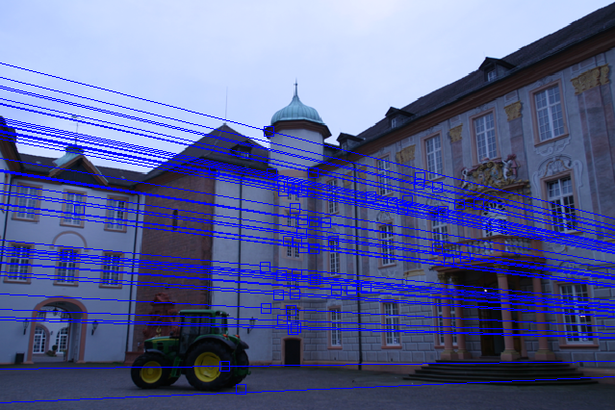
4. Reprojected Points(blue squares)
 (a) Camera2's Points Reprojected into Camera1's Image Plane
(a) Camera2's Points Reprojected into Camera1's Image Plane
 (b) Camera1's Points Reprojected into Camera2's Image Plane
(b) Camera1's Points Reprojected into Camera2's Image Plane
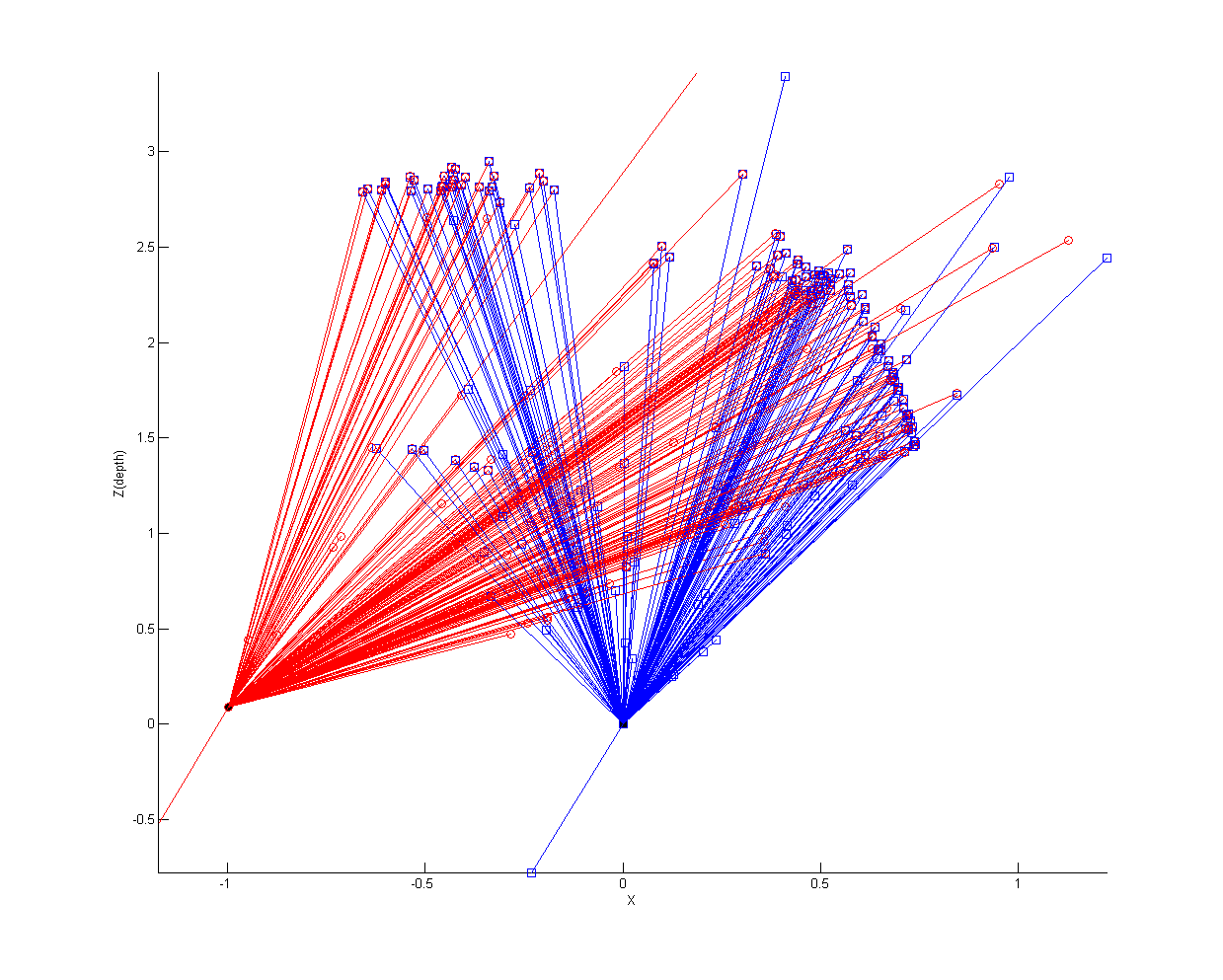
5. Reconstructed Points Cloud
Click here to see the interactive 3D points cloud